
在机器人中复刻人类体感网络对于灵巧的操作至关重要,以确保对不同柔软度和纹理的物体有适当的抓取力。尽管人工触觉感知在物体识别方面取得了进展,但准确量化触觉感知以识别柔软度和纹理仍然具有挑战性。
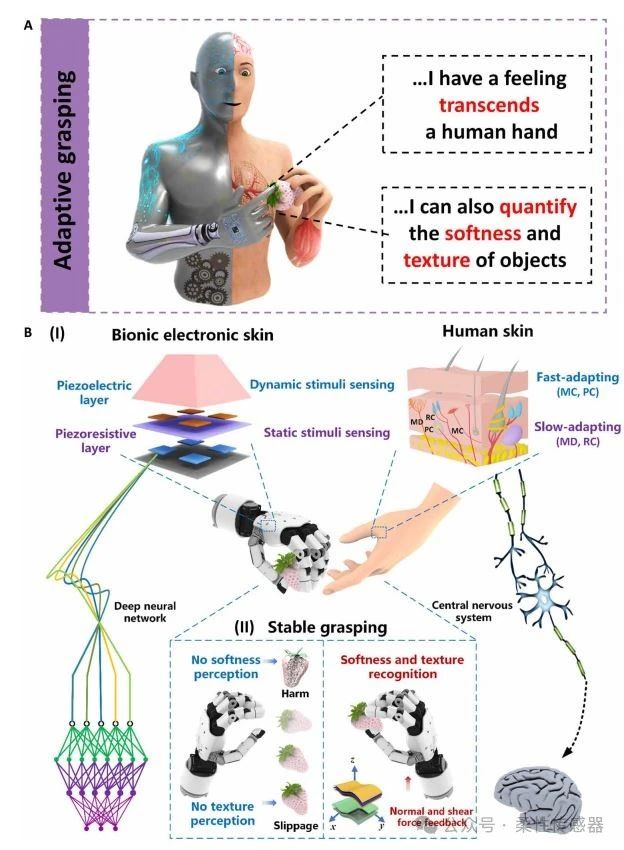
图1 人类指尖启发的柔软度和纹理识别双模触觉传感器
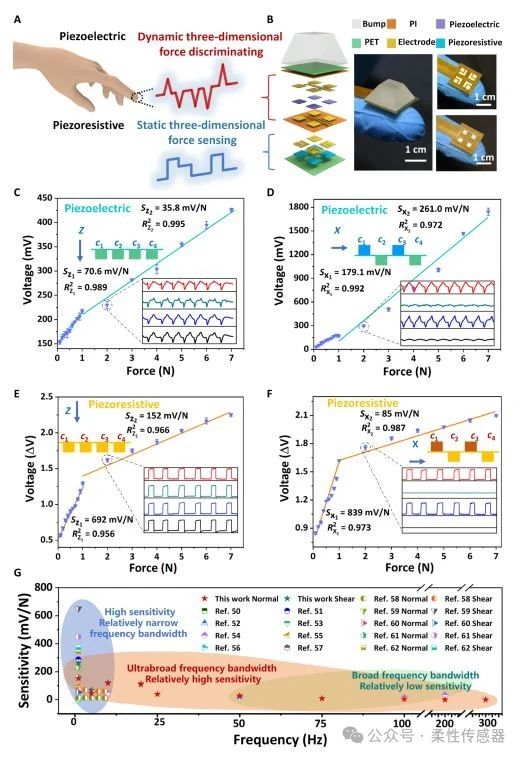
图2 双模触觉传感器的结构、传感原理及多维力传感性能
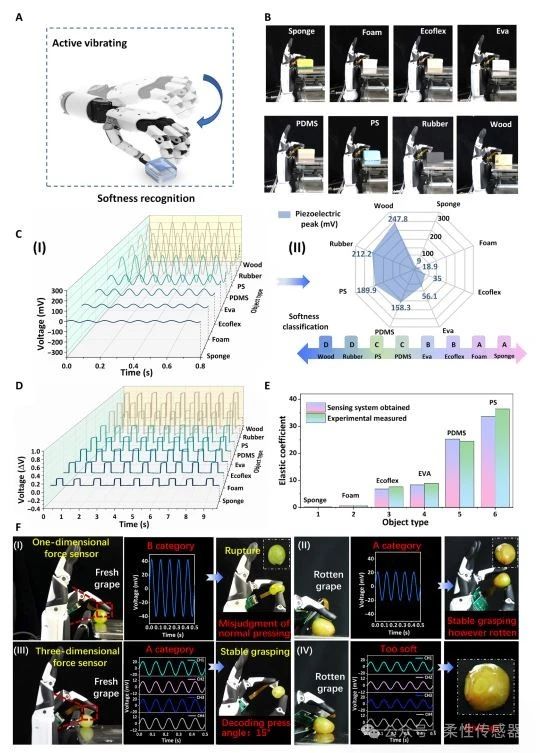
图3 基于动态分类和静态测量策略的触觉传感器柔软度识别
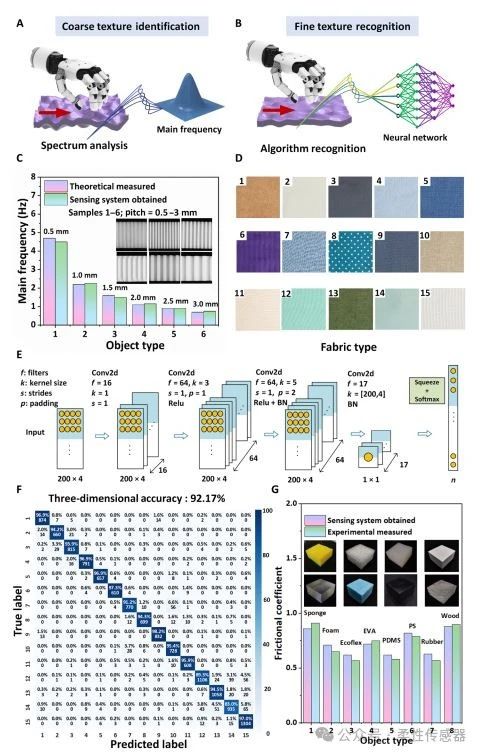
图4 频谱分析和深度学习辅助的触觉传感器的纹理识别
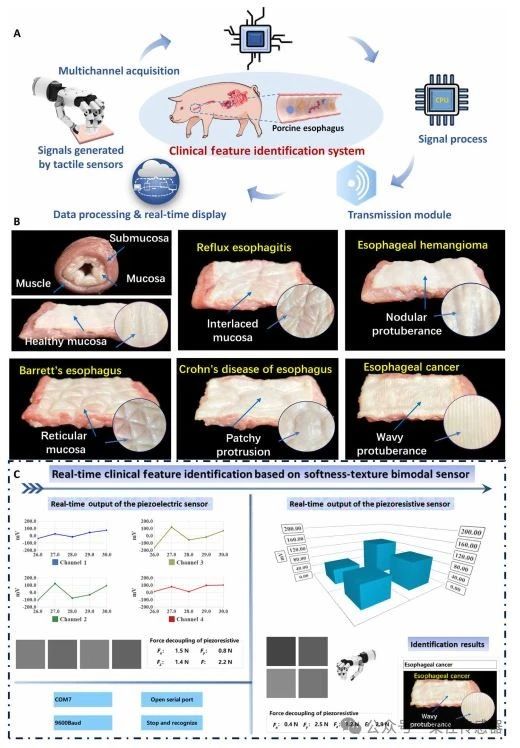
图5 基于双模触觉传感器和交互界面的临床特征识别在医学中的应用
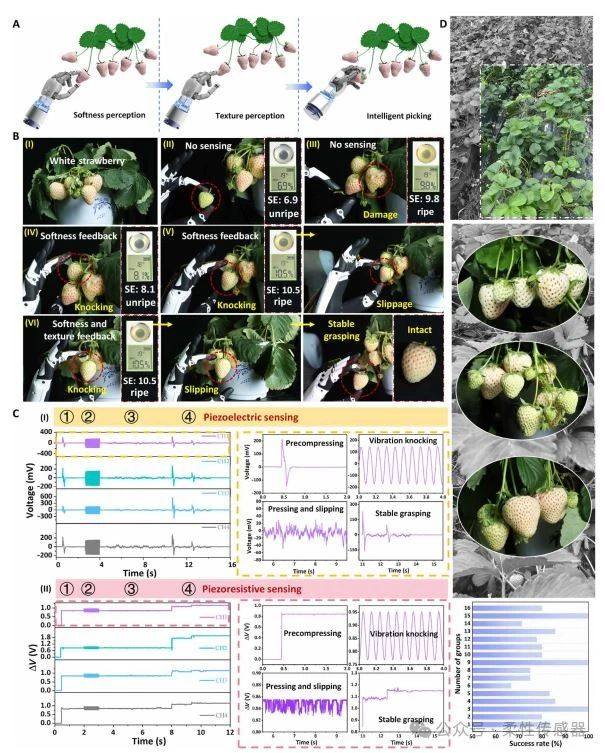
图6 双模触觉传感器在白草莓智能采摘中的农业应用
- 原文题目:Quantitative softness and texture bimodal haptic sensors for robotic clinical feature identification and intelligent picking
- 论文第一作者:Ye Qiu
- 原文链接:https://www.science.org/doi/10.1126/sciadv.adp0348